四足机器人
目前支持多种机器人硬件编程、比赛。
1. 四足机器狗 XGO竞赛版
XGO竞赛版机器狗是一款专为青少年AI与机器人竞赛设计的15自由度桌面级四足机器狗。
XGO机器狗采用ESP32微控制器为核心,支持WiFi和蓝牙连接,专注于实时控制与轻量化编程,大幅降低竞赛门槛。
- 运动性能
运动自由度 (DOF)
● 全向移动能力:整机包含 15个高性能舵机(每条腿 3 个自由度),分别控制大腿、小腿及侧摆运动。
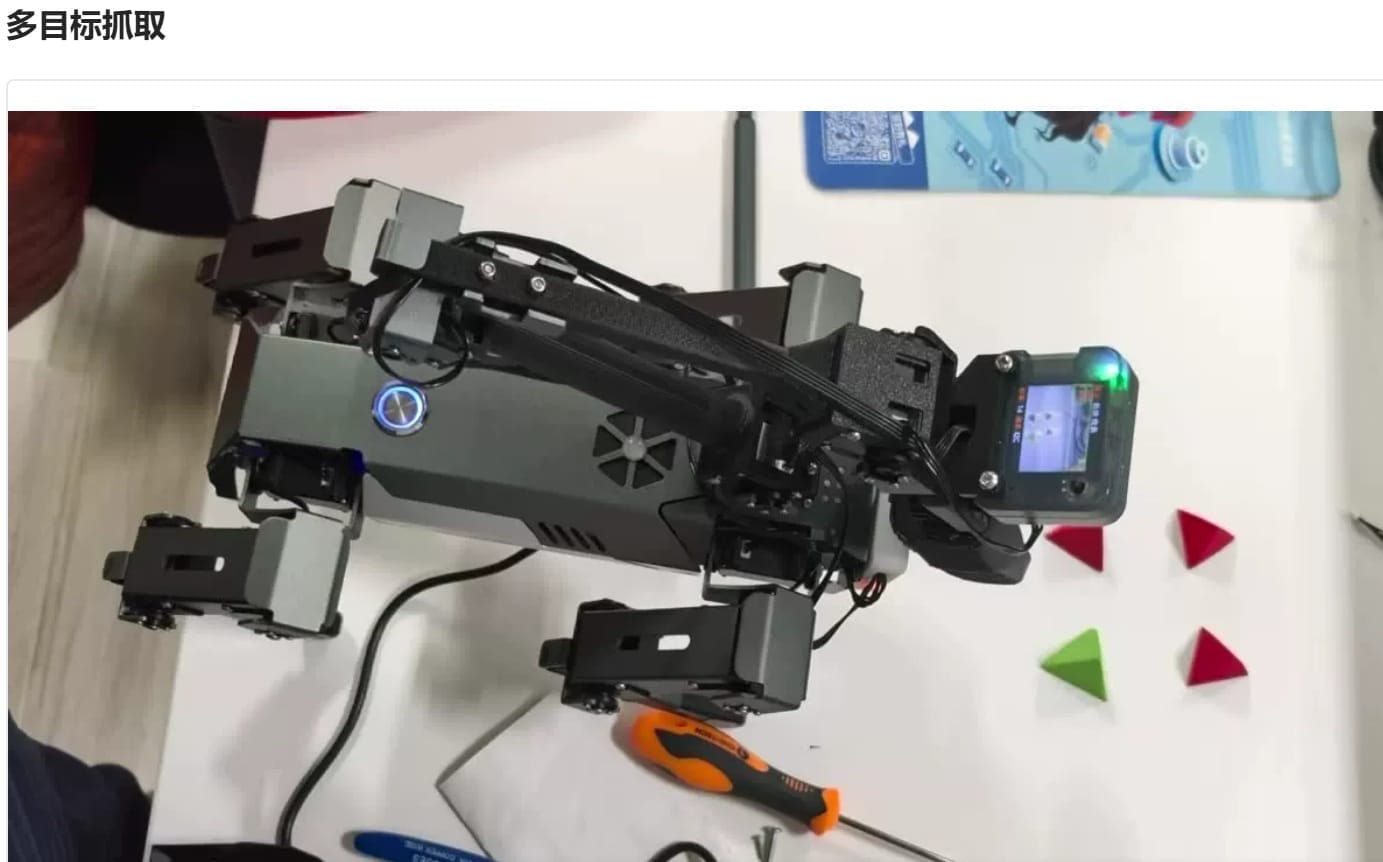
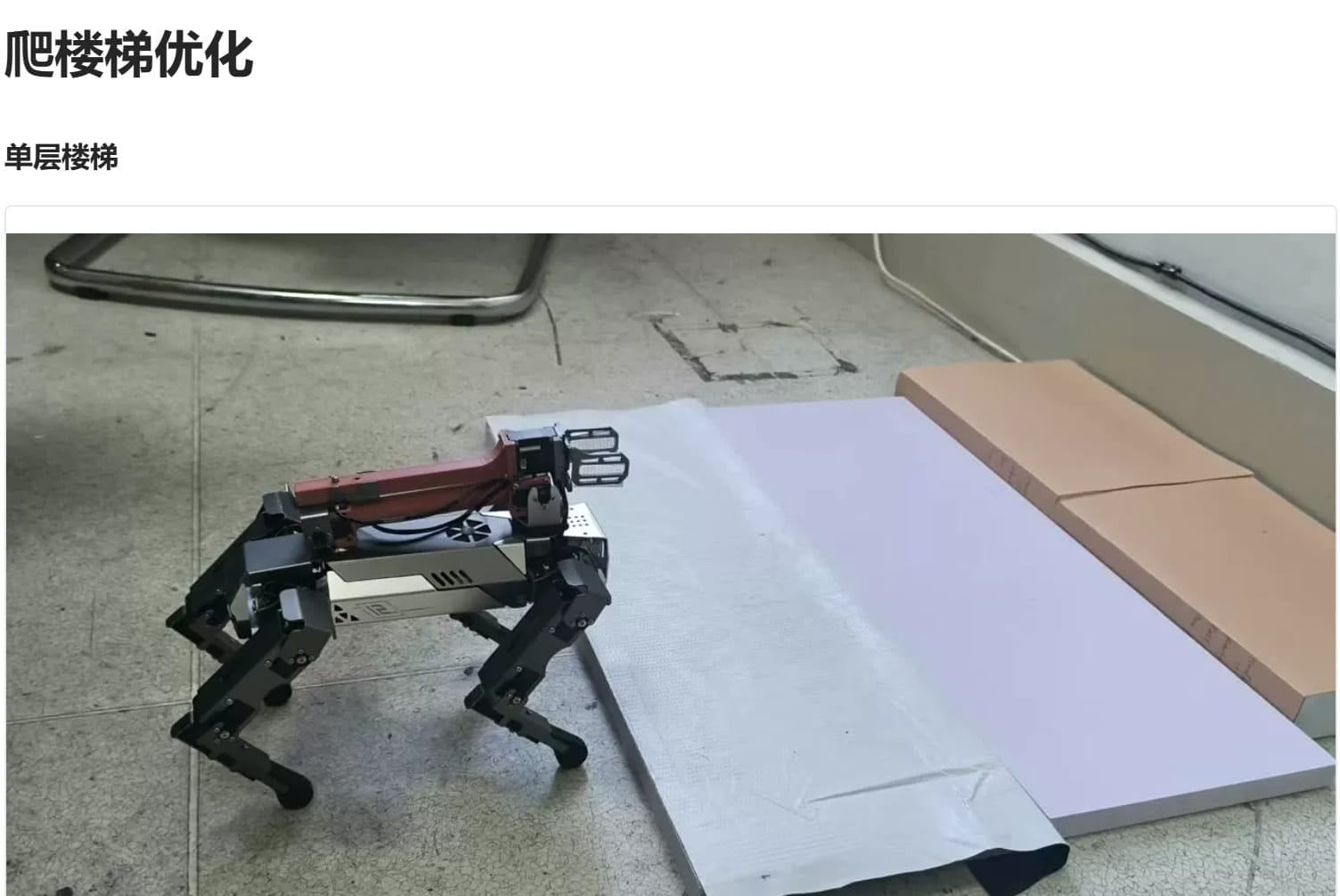
● 动作表现:支持全向移动(前后左右平移)、原位旋转、甚至复杂的姿态控制(如匍匐、伸懒腰、握手)。
- 运动控制核心
● 本体通常内置独立的运动控制协处理器(与头部的 ESP32 通信)。
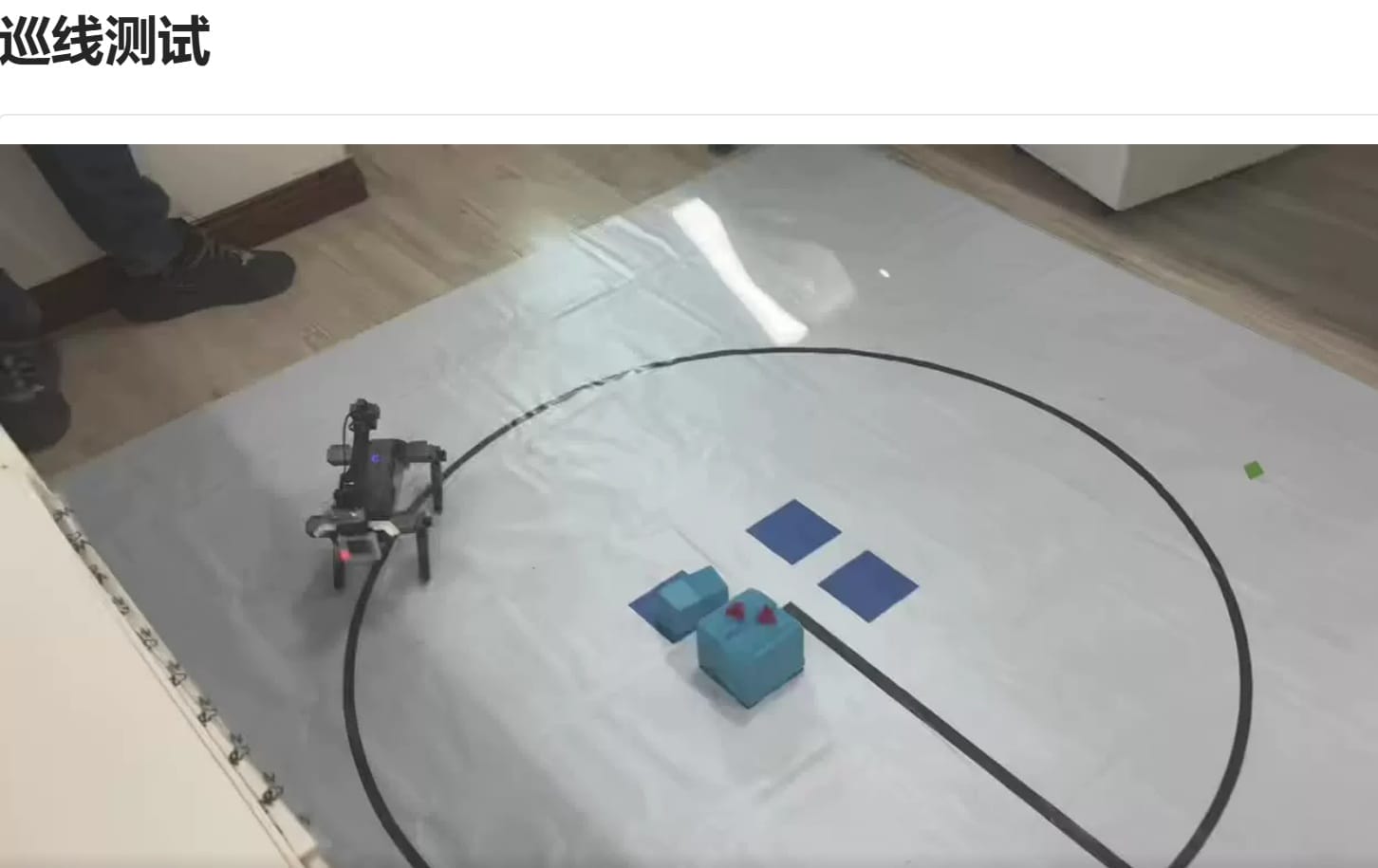
● IMU 姿态稳定:内置 IMU(惯性测量单元),实现闭环控制,使机器人即使在受到外力干扰或在不平整地面行走时,也能自动保持平衡。
- 机械结构
● 材质:通常采用铝合金,兼顾轻量化与结构强度。
● 舵机特性:XGO 系列舵机具备总线通信能力,支持位置反馈、温度反馈及电压反馈,确保运动精准且安全。
 |  |
|---|
 |  |
|---|
2. 开源 3D 打印 ESP32 机器狗:
四足机器人的步态(如 Trot、Pace、Bound)更为复杂,是对数学逻辑和硬件控制的极佳锻炼。
特点: 利用 Rhino、SolidWorks 等软件设计或下载开源的 8 自由度(8个舵机)或 12 自由度的机器狗图纸。
MicroBlocks 适配: 主控使用 ESP32 + PCA9685(16路 PWM 驱动芯片)。
MicroBlocks 提供了 I2C 和专用的 PCA9685 积木库。你可以利用并发任务,让四条腿的动作函数独立运行,通过主循环协调它们的相位差,实现流畅的行走。